Ne veste, katero vrsto elementa izbrati za svojo simulacijo? Jih sploh prepoznate? Ta blog v skrajšani obliki predstavlja glavne tipe elementov in njihove značilnosti.
Ogledali si bomo različne vrste elementov, pomen števila vozlišč, ključne prostostne stopnje, formulacije, integracijske možnosti ter področja uporabe teh elementov pri strukturnih analizah.
1. Uvod
1.1 Družine
Družina končnih elementov je najširši pojem, ki združuje elemente iste vrste.
Znotraj te družine si elementi delijo nekatere skupne lastnosti, glavna razlika med njimi pa je njihova geometrija oziroma oblika, ki jo posamezen element zavzema.

1.2 Število vozlišč
Končne elemente si lahko predstavljamo kot gradnike bolj kompleksnih struktur.
Vsak element ima vozlišča, ki določajo njegovo domeno in opredeljujejo prostostne stopnje.
Sposobnost deformacije je povezana tudi z načinom interpolacije – torej s tem, kako ocenjujemo obnašanje med vozlišči.
Prav število vozlišč določa vrsto interpolacije, ki jo element uporablja:
- Prvi red (linearna interpolacija)
- Kvadratična interpolacija (kvadratična interpolacija)

1.3 Prostostne stopnje
Vsako vozlišče ima več prostostnih stopenj (ang. degrees of freedom, DOF). V resnici so to neznanke, katere iščemo. Predstavljajo pa osnovne fizikalne količine kot so:
- pomik,
- rotacija,
- temperatura,
- elektični potencial.
1.4 Formulacije
Imamo še dodaten način ločevanja elementov. To je po enačbah, ki stojio v ozadju in določajo odziv. Obstajajta dva glavna načina formulacij
- Legrang-jeva: element se premakne in deformira z materialom, ki ga predstavlja (npr. strukturne analize)
- Euler-jeva: element ostane fiksen in material teče skozi (npr. CFD).
Obstaja še nekaj drugih, ki jih bomo omenili pozneje.
1.5 Integracija
ABAQUS uporablja numerično metodo, imenovano integracija, za izračun obnašanja materiala znotraj elementa. Znotraj vsakega elementa določi integracijske točke, v katerih izračuna, kako naj se material obnaša. Večje število teh točk pomeni natančnejši izračun, a hkrati tudi večjo potrebo po računski moči. ABAQUS omogoča uporabo metode zmanjšane integracije, ki bistveno zmanjša računske zahteve, vendar lahko v določenih primerih povzroči nenatančne rezultate.

1.6 Dimenzije elemntov
Elementi obstajajo v prostoru, hkrati pa tudi njim pripišemo dimenzijo. Pomembno je, da razlikujemo med naslednjima dvema dejstvoma:
- Dimenzija elementa: Koliko neodvisnih spremenljivk rabimo, da popišemo velikost končnega elementa,
- Prostorska dimenzija: Koliko dimenzij naš objekt zaseda.
Pomembno si je zapomniti, da lahko element nižje dimenzije popiše dogajanje v višjedimenzijonalnem prostoru.
2. Volumski (solid) elementi – 3D
To so elementi, ki jih najpogosteje srečamo na posnetkih, predstavitvah in drugih vsebinah, saj si jih najlažje predstavljamo. Običajno jih ponazarjamo kot kocke, ki sestavljajo modele in konstrukcijske sklope. Uporabni so za opis skoraj vsakega problema. Najpogosteje jih uporabljamo pri linearnih in nelinearnih analizah, kjer nastopajo kontakti, plastične deformacije in večje elastične deformacije. Uporabljamo jih predvsem takrat, ko geometrije ni mogoče poenostaviti in analizirati z nižjedimenzijskimi elementi.
Kar zadeva neznanke pri teh elementih, je značilno, da imajo le pomične prostostne stopnje, in sicer v smereh x, y in z. Z drugimi besedami: vsako vozlišče običajno prispeva tri dodatne neznanke, ki jih mora računalnik izračunati.
2.1 Označba
Vsak tip elementa ima določeno označbo, ki nam pove, kaj lahko simuliramo. Primer oznake lahko najdemo spodaj z razlago pojmov:
C3D20RHT
- C – volumski element
- 3D – oznaka za tridimenzinalni 3D element
- 20 – število vozlišč
- R – zmanjšana integracija (opcijski)
- H – hibridni (opcijski)
- T – povezan temperaturno-pomični element (opcijski)
Seveda je teh oznak mnogo več zaradi vseh možnih kombinacij. Tu je le en primer predstavljen.
2.2 Predstavniki

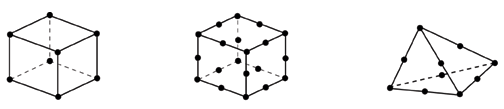
Prvi predstavniki so tetraedrični elementi. Pogosto se uporabljajo pri avtomatskem mreženju, saj z njimi lahko pokrijemo poljubno geometrijo brez predhodne priprave. Linearna oblika teh elementov (C3D4) je zelo toga in zato neprimerna za analizo kritičnih območij. Kvadratna različica (C3D10) omogoča bolj natančno oceno dogajanja v materialu, vendar je bistveno bolj računsko zahtevna.
Druga pomembna oblika so heksaedrični elementi oziroma t. i. brick elementi. Tudi ti obstajajo v različnih oblikah, odvisno od vrste analize. Za razliko od tetraedrov tukaj geometrija zahteva predhodno pripravo, če želimo doseči ustrezno kakovost mreže. Težave lahko nastopijo pri večjih deformacijah, ko elementi izgubijo natančnost. Njihova glavna prednost je večja računska učinkovitost, boljša konvergenca in manjša občutljivost na orientacijo mreže.
Tretja skupina so klinasti (wedge) elementi. Ti se običajno uporabljajo za dopolnjevanje mreže v območjih, kjer visoka natančnost ni ključna.
Imamo še druge predstavnike te kategorije za bolj specializirane primere kot so elementi za:
- ravninsko napetostno stanje,
- ravninsko deformacijsko stanje,
- aksisimetrični elementi,
- in vse variacije med zgoraj naštetimi in opisanimi elementi.
3. Lupinski (shell) elementi – 2D
Lupinski elementi, kot že ime pove, so optimizirani za modeliranje lupinskih oziroma tankih struktur, pri katerih je ena izmed dimenzij – debelina – zanemarljiva v primerjavi z drugima dvema. Takšno geometrijo pogosto najdemo pri pločevinastih konstrukcijah. Pred mreženjem je treba geometrijo ustrezno pripraviti in iz nje izluščiti sredinsko ravnino, na katero nato napnemo lupinske elemente.
V vozliščih imajo ti elementi za neznanke tako pomike kot tudi rotacije. To pomeni, da vsako vozlišče običajno prispeva šest neznank, ki jih je treba izračunati.
3.1 Označba
Vsak tip elementa ima določeno označbo, ki nam pove, kaj lahko simuliramo. Primer oznake lahko najdemo spodaj z razlago pojmov:
S8R5
- S – lupinski element za strukturno analizo
- 8 – število vozlišč
- R – zmanjšana integracija (opcijski)
- 5 – število prostostnih stopenj
Seveda je teh oznak mnogo več zaradi vseh možnih kombinacij. Tu je le en primer predstavljen.
3.2 Predstavniki

Prvi predstavnik je konvencionalni lupinski element (oznaka se začne s črko S). Pri definiranju takšnega elementa potrebujemo sredinsko površino. Debelina materiala ni določena z geometrijo, temveč kot lastnost preseka te površine. Ti elementi imajo vseh šest prostostnih stopenj. Glede na specifični tip omogočajo tudi spremembe geometrije med simulacijo, upoštevanje prečnih strižnih deformacij, velikih rotacij in podobno. Tako kot pri volumenskih elementih poznamo različne oblike, kot so trikotni in štirikotni elementi, ki si delijo podobne lastnosti.
Drugi glavni tip so kontinuirani lupinski elementi (oznaka se začne s črkami SC). Za razliko od konvencionalnih ti elementi mrežijo volumen, pri čemer se debelina določa neposredno kot razdalja med vozlišči. V vozliščih imajo le tri prostostne stopnje – pomike. Ti elementi omogočajo velike deformacije in so primerni za nelinearne analize. Lahko jih nalagamo po debelini, kar omogoča bolj natančno simulacijo odziva skozi debelino materiala. Imajo tudi prednost pri modeliranju kontaktov, saj podpirajo dvostranski kontakt, ki upošteva spreminjanje debeline.
Pri lupinskih elementih ima pomembno vlogo tudi razporeditev integracijskih točk skozi debelino ter način izpisa rezultatov. Pri razporejanju ločimo Simpsonovo in Gaussovo pravilo. Prav tako je treba biti pozoren, ali program vrača rezultate na zgornji ali spodnji strani lupine.
Poleg navedenih poznamo tudi aksisimetrične različice teh elementov, namenjene modeliranju rotacijsko simetričnih geometrij.
4. Palični in nosilni elementi (truss and beam elements) – 1D
4.1 Palični (truss) elementi
Ti elementi so optimizirani za dolge, vitke strukture, ki lahko prenašajo obremenitve le v aksialni smeri in ne prenašajo momentov. Tipične uporabe vključujejo paličja, vrvi, jeklenice, armirani beton in podobne konstrukcije. Zaradi enostavne formulacije so ti elementi izredno računsko učinkoviti, še posebej pri analizah velikih konstrukcij in oceni njihovih glavnih gabaritnih mer.
Pri teh elementih je treba definirati le velikost preseka. Neznanke predstavljajo zgolj pomiki v vozliščih.
Označba
Vsak tip elementa ima določeno označbo, ki nam pove, kaj lahko simuliramo. Primer oznake lahko najdemo spodaj z razlago pojmov:
T3D2H
- T – palični element
- 3D – tridimenzionalni element
- 2 – število vozlišč
- H – hibridni (opcijsko)
Seveda je teh oznak mnogo več zaradi vseh možnih kombinacij. Tu je le en primer predstavljen.

4.2 Nosilni (beam) elementi
Podobno kot palični elementi so tudi nosilni elementi namenjeni dolgim, vitkim strukturam. Ključna razlika pa je, da nosilni elementi poleg aksialnih sil prenašajo tudi momente. Pogosto se uporabljajo za preračune glavnih konstrukcijskih mer pri mostovih, žerjavih, okvirjih in podobnih konstrukcijah, pogosto v kombinaciji s paličnimi elementi.
Za njihovo uporabo je poleg preseka potrebno določiti še orientacijo. V vozliščih imajo šest prostostnih stopenj – tri pomike in tri rotacije.
Označba
Vsak tip elementa ima določeno označbo, ki nam pove, kaj lahko simuliramo. Primer oznake lahko najdemo spodaj z razlago pojmov:
B31OSH
- B – nosilni element
- 3 – nosilni element v prostoru
- 1 – linearni
- OS – odprt prerez (opcijsko)
- H – hibridni (opcijsko)
Seveda je teh oznak mnogo več zaradi vseh možnih kombinacij. Tu je le en primer predstavljen.

Poleg vseh zgornjih elementov pa najdemo seveda še bolj specializirane in nišne. Vendar več o vsem tem in podrobnejši opisi so izven obsega tega krajšega predstavitvenega bloga.
Za več informacij kontaktirajte IB-CADDY preko telefona (01 566 12 55) ali pa preko elektronske pošte (info@ib-caddy.com)
Vir: https://classes.engineering.wustl.edu/2009/spring/mase5513/abaqus/docs/v6.6/books/usb/default.htm