V svetu numeričnih simulacij mehanskih sistemov je pravilno definiranje kontaktnih interakcij ključnega pomena za natančnost rezultatov. Zlasti pri kompleksnih sestavih, kjer se lahko stika več teles hkrati, postane upravljanje kontaktov hitro zahtevno in zamudno. Ravno zato je funkcionalnost splošnega kontakta (General Contact) v programskem okolju Abaqus ena izmed najbolj cenjenih izboljšav – omogoča hitro, učinkovito in robustno definicijo stikov brez potrebe po ročnem določanju vseh kontaktnih parov.
Splošen kontakt poenostavi pripravo modela in obenem poveča zanesljivost simulacij, saj zmanjša tveganje, da bi kakšen stik ostal nedefiniran. V tej objavi si bomo ogledali, kako deluje ta zmogljivo orodje, kdaj ga uporabiti in katere so njegove ključne prednosti v primerjavi z drugimi pristopi definiranja kontaktov.
Splošen kontakt (General Contact), bodisi v okolju standardnih ali eksplicitnih simulacij, uporabniku omogoča prilagodljivo in natančno definiranje kontaktnega področja. To vključuje določanje vključitev za splošen kontakt, s katerimi se prepoznajo možna območja interakcije, ter izključitev, s katerimi se določene interakcije izključijo, kar omogoča natančno in učinkovito simulacijo. Takšno zmožnost nam omogoča Abaqus programsko orodje, ki stoji za standarnimi in eksplicitnimi simulacijami ter za novejšo 3DEXPERIENCE platformo, ki vključuje simulacijske pakete.
V obeh primerih, tako v standardnih kot v eksplicitnih simulacijah, je mogoče kontaktno področje definirati z možnostjo »samodejno« (automatic), ki zajema vse zunanje površine elementov, robove ter analitične toge površine. Ta privzeta nastavitev poenostavi pripravo simulacije, saj samodejno zajame vse možne interakcije med vozlišči in ploskvami in robovi, brez potrebe po ročnem definiranju posameznih kontaktnih parov.
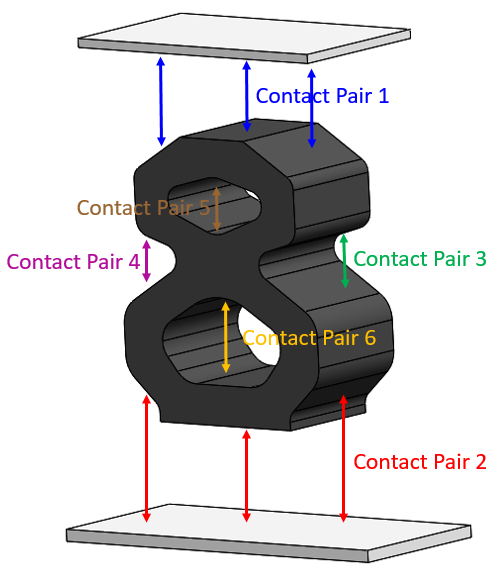
Uporabnik ima možnost dodatnega izpopolnjevanja kontaktnega področja z natančnim določanjem površin ali materialov, ki naj bodo vključeni ali izključeni iz kontaktne domene, ter z dodajanjem posameznih kontaktnih lastnosti. Poleg tega je mogoče definicijo splošnega kontakta dinamično prilagajati tekom analize, kar pomeni, da se lahko določene površine aktivirajo ali deaktivirajo v kontaktni domeni, kadar je to potrebno. Proces je zasnovan tako, da je hiter in enostaven, hkrati pa omogoča visoko stopnjo nadzora in prilagodljivosti.
Nastavitev kontaktnega modela sledi hierarhičnemu pristopu: najprej se upoštevajo vključitve, nato izključitve, pri čemer imajo slednje prednost. Tak pristop omogoča natančen nadzor nad kontaktnimi pogoji, ki so vključeni v simulacijo, kar olajša modeliranje kompleksnih sestavov in interakcij.
Splošen kontakt v eksplicitnih simulacijah
Proces določanja splošen kontaktov (General Contact) se začne z specifikacijo kontaktne domene preko samodejno ustvarjene kontaktne površine. Ta vključuje vse površinske ploskve elementov, vse analitične toge površine ter v primeru eksplicitnih simulacij tudi površine na materialih z Eulerjevimi lastnostmi (ki se pogosto uporabljajo pri interakciji med tekočinami in strukturami).
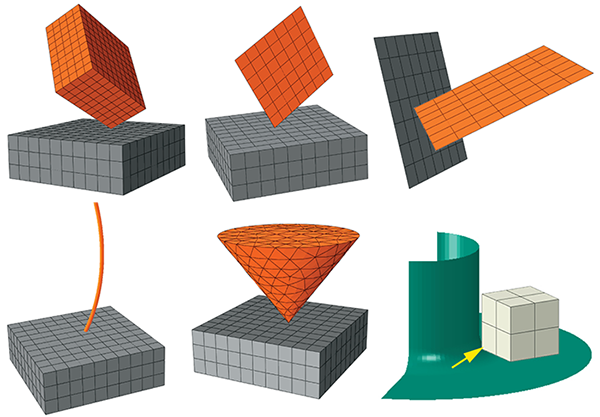
Vir: Dassault User Assistance, General Contact
Splošen kontakt uporablja napredne metode, ki zagotavljajo učinkovito in pravilno uveljavljanje kontaktnih pogojev. V eksplicitnih modulih se tako generirajo kontaktne sile, ki preprečujejo vdiranje vozlišč v ploskve, vozlišč v analitične toge površine in stikov rob-na-rob na vseobsegajoči površini. Tako se omogoča celovita rešitev kontaktne obravnave v najrazličnejših simulacijskih scenarijih, brez potrebe po zapletenem ročnem definiranju kontaktov.
V posebnih primerih se lahko algoritem splošnega kontakta uporabi tudi v kombinaciji z algoritmom kontaktnih parov (contact pair). Na voljo je za dvodimenzionalne, osno-simetrične in tridimenzionalne površine, vendar se lahko uporablja izključno v mehanskih analizah s končnim drsenjem (finite-sliding contact).
Splošen kontakt ne podpira kinematičnega uveljavljanja omejitev (kinematic constraint enforcement), temveč uporablja metodo kazni (penalty method) za uveljavljanje kontaktnih pogojev.
Splošen kontakt v standardnem paketu
Algoritem splošnega kontakta pri standarnih simulacijah v Abaqusu dinamično zaznava in obravnava različne vrste stikov – stik med površinami, robom in površino, robom in robom ter točko in površino – skozi celotno simulacijo, kar povečuje njegovo zmogljivost pri obravnavi kompleksnih interakcij. Uporablja metodo sledenja s drsenjem (finite-sliding), ki je še posebej učinkovita pri 3D modelih, obenem pa predstavlja edini razpoložljivi pristop za dvodimenzionalne in osnosimetrične modele.
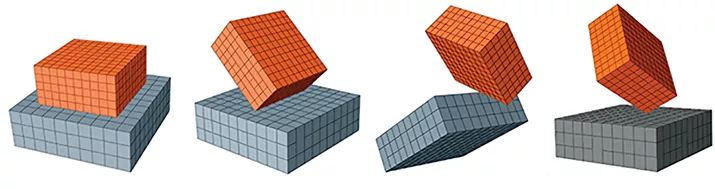
Vir: GoEngineer, Understanding Abaqus General Contact
Algoritem se odlikuje po prilagodljivosti, saj se med potekom simulacije samodejno prilagaja spremembam in prehaja med različnimi formulacijami kontaktov. Na primer, pri simulaciji vpenjalnega spoja lahko v začetni fazi daje prednost stiku rob–površina, kasneje pa, ko se območje stika poveča, preide na stik med površinami. Tak adaptivni pristop zagotavlja natančno upoštevanje kontaktnih pogojev in preprečuje numerične težave, s čimer postane zanesljivo orodje za širok spekter simulacij.
Če Vas zanima, kako bi lahko uporaba splošnega kontakta olajšala vaše delo s sestavi, nas kontaktiraje na elektronsko pošto (info@ib-caddy.com) ali pa prek telefona (01 566 12 55).